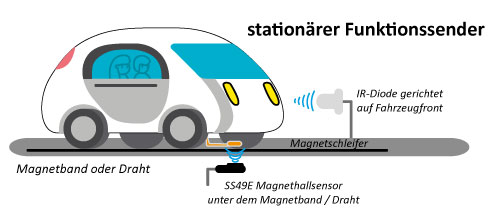
Der FeedCar sendet an den vorbeifahrenden CarDecoder, abhängig von dem Eingang / Sensor,
zwei verschiedene Funktionsbefehle (F0-F28), an alle oder nur bestimmten Fahrzeugtypen.
Die Auswahl, welcher IR-Befehl gesendet wird, erfolgt mit Aktivierung des Eingangs für diesen Kanal
Funktionsbeispiel:
Sie wollen bei allen vorbeifahrenden Fahrzeugen das Licht einschalten, bevor das Fahrzeug in das Tunnel fährt.
Diese Funktion kann unabhängig von einer PC-Steuerung mit dieser Baugruppe realisiert werden.
Mit Hilfe von Fahrzeugtypen (Zuordnung im CarDecoder), kann auch dieser Steuerbefehl nur einen bestimmten vorbeifahrenden Fahrzeugtyp,
übermittelt werden. |
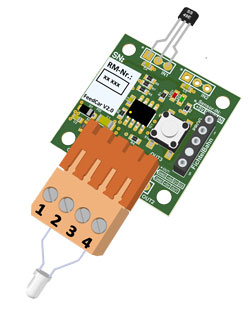
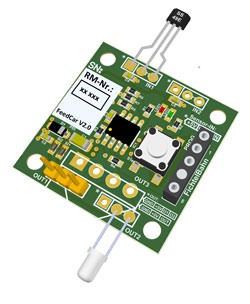
Zum Senden von IR-Befehlen an vorbeifahrende Fahrzeuge, wird eine IR-Diode am FeedCar benötigt. Diese wird an den Sensorausgang 2 (Out2) angeschlossen.
Das FeedCar kann zwei verschiedene Adressen an den vorbeifahrenden CarDecoder senden, je nach dem welcher Eingang ausgelöst wurde. (Anwendung auch mit Mit diesem Trick können zwei verschiedene Positionen gemeldet werden, die z.B. von zwei unterschiedliche Fahrspuren oder auch Fahrrichtungen stammen. |
|